Differentiable Cutting-plane Layers for Mixed-integer
Linear Optimization
Joint work with Gabriele Dragotto, Jaime Fernández Fisac and Bartolomeo Stellato. Arxiv link.
Sometimes one must solve the same optimization problem repeatedly, with only a small change in the parameters of the problem each time. Examples of this may include
a robot which solves a motion planning problem for 10 seconds into the future, then takes an action, then resolves the problem 10ms later when the environment changes.
Or an algorithmic trader, who recalculates the best predictor in a linear regression 100 times a second to take into account a small amount of new signal.
Does is make sense to re-solve the optimization problem from scratch each time the trader, or the robot, wants to update its estimate? It certainly does not. However,
knowledge of how to create solvers which are faster in successive solves of the same problem is very limited.
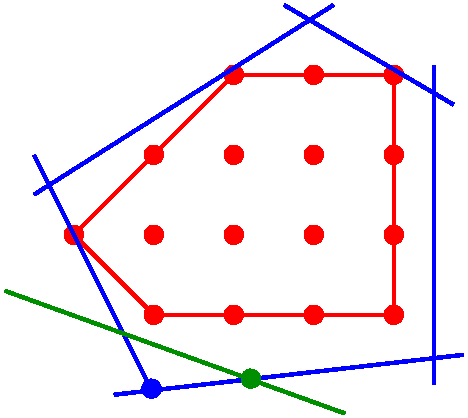
In this paper, we contribute new technology to help solve this problem in the case of Mixed Integer Programs (MIPs) using cutting planes. Cutting planes are used
in all state-of-the-art MIP solvers. They are cuts (inequalities) which cut off part of the linear relaxation of the feasible region, without cutting off any integer-feasible
points.